









A raymarched Julia set, cut in half (video)
Intersection
So, unlike rendering in the complex plane (in 2D) which is easy and direct, when rendering quaternionic (4D) fractals in 3D we have to give up some nice things. First, since we are going to be rendering in 3D, we need to decide which three of the four components of the quaternion plane H we'll be using for display purposes. This is an easy decision - just pick any three. We could use some fancy perspective of stereographics projection and use the four of them, but for now we can make our lives easier and just pick three.
The real loss when rendering in 3D is that (not always, but generally) we are going to be rendering only the edge/surface/border of the filled Julia set, or in other words, the actual real Julia set. We won't have fancy exterior coloring, and we will likely see very little of the inner parts of the set, since in 3D we cannot see through surfaces. Of course clipping planes can help us explore the interior, but let's ignore that for now.
So, our problem is now that of raycasting in search for an intersection point between 3D rays and our Julia set. As with all raycasting of shapes with no direct closed form intersection function, we can employ raymarching of SDFs. This is a powerful technique, provided we have an SDF, ie, a Signed Distance Function, to the object we are trying to raycast. Naturally you can perform an analytic intersection test first with the fractal's bounding box or sphere to quickly discard rays that miss the fractal, but also to speed things up by limiting the raymarching to the segment between the entry and exit points of the ray inside the bounding volume.
Luckily for us, Julia set of polynomial equations, including the classic f(q) = q2+c of course, do have a simple way to compute the distance to a point (provided we aren't too far from it), namely:

The derivation of this SDF itself is based on the Boettcher mapping of the exterior of the set and its Green function or Hubbard-Douady potential. Read the article to learn more about that part.
Once the intersection has been found between the ray and the fractal, it's time to compute a surface normal for lighting purposes. Knowing that our shape is a fractal it is a bit weird to talk about surface normals, since the surface is generally not differentiable (nor smooth). But, in the end of the day we are setting a resolution or threshold or sampling rate that is effectively band limiting the detail of the shape, so a normal can be effectively computed.
Surface normals, method 1 : gradient of d(q0)
The simplest way to get a normal is through the gradient of the SDF. This is our typical numerical differentiation method applied directly to the SDF d(q0). We know this works and not much can go wrong with it. An implementation of this method for a traditional Julia set f(q)=q2+c is below and also at https://www.shadertoy.com/view/MsfGRr as METHOD 0:
vec3 calcNormal( in vec3 q, in vec4 c )
{
const vec2 e = vec2(0.001,0.0);
vec4 qa=vec4(q+e.xyy,0.0); float mq2a=qlength2(qa), md2a=1.0;
vec4 qb=vec4(q-e.xyy,0.0); float mq2b=qlength2(qb), md2b=1.0;
vec4 qc=vec4(q+e.yxy,0.0); float mq2c=qlength2(qc), md2c=1.0;
vec4 qd=vec4(q-e.yxy,0.0); float mq2d=qlength2(qd), md2d=1.0;
vec4 qe=vec4(q+e.yyx,0.0); float mq2e=qlength2(qe), md2e=1.0;
vec4 qf=vec4(q-e.yyx,0.0); float mq2f=qlength2(qf), md2f=1.0;
for(int i=0; i<numIterations; i++)
{
md2a *= mq2a; qa = qsqr(qa) + c; mq2a = qlength2(qa);
md2b *= mq2b; qb = qsqr(qb) + c; mq2b = qlength2(qb);
md2c *= mq2c; qc = qsqr(qc) + c; mq2c = qlength2(qc);
md2d *= mq2d; qd = qsqr(qd) + c; mq2d = qlength2(qd);
md2e *= mq2e; qe = qsqr(qe) + c; mq2e = qlength2(qe);
md2f *= mq2f; qf = qsqr(qf) + c; mq2f = qlength2(qf);
}
float da = sqrt(mq2a/md2a)*log2(mq2a);
float db = sqrt(mq2b/md2b)*log2(mq2b);
float dc = sqrt(mq2c/md2c)*log2(mq2c);
float dd = sqrt(mq2d/md2d)*log2(mq2d);
float de = sqrt(mq2e/md2e)*log2(mq2e);
float df = sqrt(mq2f/md2f)*log2(mq2f);
return normalize( vec3(da-db,dc-dd,de-df) );
}
But maybe we can do better.
Surface normals, method 2 : gradient of G(q0)
Instead of evaluating the gradient of d(q0) numerically, we can try doing it analytically. That results in the following (removing the dependency on q0 now for clarity):

which is a bit of a monster. However we are only interested in evaluating it at the surface of the set, where we know that G=0. There, the expression simplifies to

Or in other words, we can compute the surface normal as the normalize gradient of the Douady-Hubbard potential, G(q0). If anything, we can compute that one numerically. An implementation of this method for a traditional Julia set f(q)=q2+c is below and also at https://www.shadertoy.com/view/MsfGRr as METHOD 1:
vec3 calcNormal( in vec3 q, in vec4 c )
{
const vec2 e = vec2(0.001,0.0);
vec4 qa = vec4(q+e.xyy,0.0);
vec4 qb = vec4(q-e.xyy,0.0);
vec4 qc = vec4(q+e.yxy,0.0);
vec4 qd = vec4(q-e.yxy,0.0);
vec4 qe = vec4(q+e.yyx,0.0);
vec4 qf = vec4(q-e.yyx,0.0);
for(int i=0; i<numIterations; i++)
{
qa = qsqr(qa) + c;
qb = qsqr(qb) + c;
qc = qsqr(qc) + c;
qd = qsqr(qd) + c;
qe = qsqr(qe) + c;
qf = qsqr(qf) + c;
}
return normalize( vec3(log2(qlength2(qa))-log2(qlength2(qb)),
log2(qlength2(qc))-log2(qlength2(qd)),
log2(qlength2(qe))-log2(qlength2(qf))) );
}
This is already more efficient. But perhaps we can do even better.
Surface normals, method 3 : analytical gradient of G(q0)
The idea now is consider that G(q0) is actually

where qn is of course a huge polynomial of q0 of degree pn. If we split a quaternion into its four components q = x + i⋅y + j⋅z + k⋅w and we take the derivatives of G with respect to the four coordinates of our spave q0, then
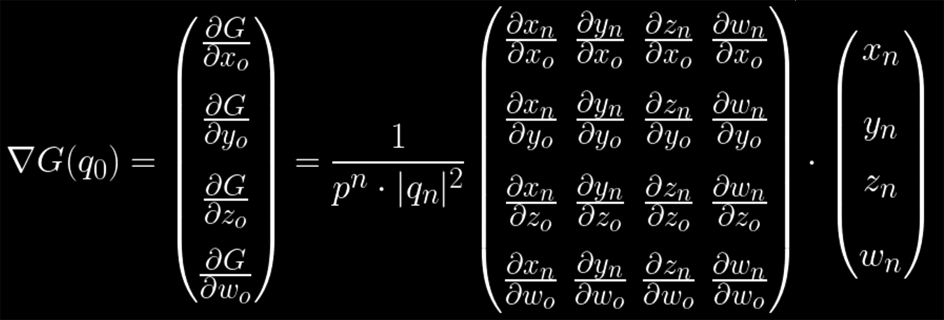
or in short:

Now, the fraction in front of the matrix we can ignore it, since we'll need to normalize our gradient vector anyways in order to perform lighting. The big matrix in the middle is the Jacobian of qn with respect to q0, which we can compute iteratively together with qn itself, though the chain rule. For example, for a traditional Julia set of f(q)=q2+c, we'd get

with Jo = I, the identity matrix. Note that the 2 in front of the matrix can be discarded for the computation as well since the final gradient will be normalized afterwards. The code for this method can be found again at https://www.shadertoy.com/view/MsfGRr under METHOD 2:
vec3 calcNormal( in vec3 qo, in vec4 c )
{
vec4 q = vec4(qo,0.0);
mat4x4 J = identity_4x4();
for(int i=0; i<numIterations; i++)
{
J = J*mat4x4(q.x, -q.y, -q.z, -q.w,
q.y, q.x, 0.0, 0.0,
q.z, 0.0, q.x, 0.0,
q.w, 0.0, 0.0, q.x);
q = qsqr(q) + c;
}
return normalize( (J*q).xyz );
}
Now, something beautiful happens when the above formula is specialized to complex numbers (for regular 2D Julia sets): the Jacobian matrix, which is a 2x2 matrix, becomes of the form

and given that the Cauchy-Riemann equations of holomorphic functions, it means that we can just keep track of the complex derivative of qn with respect to q0 and get rid of the Jacobians, which makes it twice as fast:

or in code,
vec3 calcNormal( in vec3 zo, in vec4 c )
{
vec4 z = vec4(zo,0.0);
vec2 d = vec2(1.0,0.0);
for(int i=0; i<numIterations; i++)
{
d = cmul(z,d);
z = csqr(z) + c;
}
return normalize( cmul(z,cconj(dz)) );
}
Unfortunately, although the Jacobian for the quaternion version also has lots of symmetries in it, I haven't been able to simplify it to an equivalent qn ⋅ qn'* form. I think this is due to the fact that I believe the equivalent of the Cauchy-Riemann equations for quaternions basically don't exist or don't work in that they make the meaning of a derivative useless.

Raymarched Julia set - 2001
A raymarched Julia set - 2005 (hover to play)
Raymarched cubic Julia set - 2005
Realtime raymarched Julia set - 2007 (hover to play)

Raymarched cubic Julia set (realtime) - 2013 (code)
Raymarched cubic Julia set (realtime)- 2020 (code)

Raymarched cubic Julia set - 2020

Raymarched cubic Julia set - 2020